Add to my Reading List
Add to my Reading List Remove from my Reading List
Remove from my Reading ListModern vehicles; modern challenges

Theodor Ensbury, Project Engineer
Vehicles are getting ever more complex, with subsystems becoming increasingly interdependent and the system dynamics wider than ever before. Modern vehicles now interact with their surroundings, reacting and responding to changes in the immediate environment. This is particularly true in autonomous vehicles. Consideration of the higher-level system effects on subsystem behaviour and vice-versa is now of paramount importance, including environmental interactions with the vehicle.
Vehicles are getting ever more complex, with subsystems becoming increasingly interdependent and the system dynamics wider than ever before. Modern vehicles now interact with their surroundings, reacting and responding to changes in the immediate environment. This is particularly true in autonomous vehicles. Consideration of the higher-level system effects on subsystem behaviour and vice-versa is now of paramount importance, including environmental interactions with the vehicle.
Systems engineering tools are required to be capable of considering the vehicle not only in a holistic total system manner, but also as a function of the environment.
Systems engineering consultancy Claytex is expert in the application of Dymola, the Dassault Systèmes simulation tool, for automotive and motorsport. The Warwickshire-based company offers customers a comprehensive suite of solutions that enable the modelling, simulation, and testing of a vehicle in virtual environments.
Last year Claytex completed the development of a suite of libraries for Modelica (the acausal, object orientated modelling language behind Dymola). The ‘Vehicle Systems Modelling and Analysis’ libraries or VeSyMA, launched in May 2017, provide models for the simulation of conventional, hybrid and electric vehicles, as well as motorsport applications. VeSyMA offers a set of vehicle templates with the flexibility to reconfigure subsystems and architectures to address any vehicle architecture concept. VeSyMA is intended to help designers and engineers combine different aspects – propulsion systems, powertrain, suspensions and so forth – of a vehicle architecture.
“Players in the autonomous vehicles sector need to take the significance of vehicle physics seriously when deploying simulation tools. It is necessary to have a correct physics model inside these simulators in the longer term. This is because engineers need to reliably predict how an autonomous vehicle will respond in relation to internal and external situations and how to manage the vehicle’s response,” says Claytex managing director Mike Dempsey.
Another challenge is to build a deeper understanding of how real-world factors are likely to impact the performance of sensors when deployed in autonomous vehicles. “For example, how to account for different weather conditions. With a lidar sensor, as soon as the humidity increases, the distance it can see starts to drop off. When it rains, increased ‘scatter’ means that the performance of the sensor drops off. We need to be able to look at how we characterise the sensor behaviour and build such contingencies into the model”, adds Dempsey.
Introducing the VeSyMA concept
VeSyMA is intended to help designers and engineers combine different aspects – engine, powertrain, suspensions and so forth – of a vehicle architecture. “This has typically been quite difficult to do,” says Mike Dempsey. “The completely integrated suite allows efficient combination of different aspects. The user is building on an open platform, the basic architecture is defined using an open standard so we’re easily able to extend it to encompass new ideas and new systems.”
As a reseller for driver-in-the-loop simulation software rFpro, Claytex can – allied with its long-standing Dymola expertise – offer immersive virtual test environments that allow automotive developers to learn more and faster by bringing together the driving simulator technology and the simulation capability that provides the physics of how the car responds to control inputs.
“By exploiting the scalability of VeSyMA, users can study specific events they have noticed in simulator sessions in much greater detail offline. Detail and workflows can work both ways when harnessing real-time simulation. It can be easy to assume that one can only move from offline to online scenarios, whereas we do have the ability to study an event or incident from the simulator session in much greater detail offline (more complex vehicle and sensor models, manual manipulation of the parameters of the “event” under investigation),” says Theodor Ensbury, Project Engineer at Claytex.
Dymola has long been established as a tool for the simulation of vehicles; its component-oriented physical modelling approach can span multiple physical domains, such as mechanical, fluid, control, electrical and thermal in an acausal manner. Coupled with the concept of model reuse, Dymola enables the engineer to focus on the modelling of the components themselves, rather than reformulating and maintaining banks of models for different analysis types. By harnessing the modular, acausal and multi-domain nature of Dymola and the Modelica language, the VeSyMA suite of libraries can be deployed with the rFpro real-time virtual test environments to provide a complete vehicle simulation solution.
The VeSyMA – rFpro toolchain
VeSyMA provides reusable component-oriented models which enable engineers to study the behaviour of the same single models in all desired scenarios. This can range from isolated R&D style bench tests to vehicle laboratory tests, controlled dynamic vehicle tests and full-scale open world driving complete with traffic and pedestrian interactions.
With its modular approach to modelling a full vehicle, VeSyMA is comprised of the cornerstone VeSyMA library which has 6 subject specific extension libraries built upon it. By itself, the VeSyMA library defines vehicle and subsystem level templates along with models capable of conducting longitudinal based studies. Templates included in the VeSyMA library define all subsystem boundaries of models in the subject extension libraries, which means any model from any VeSyMA suite of libraries can be deployed in a VeSyMA vehicle model.
In the race to bring autonomous vehicles to market, this flexibility of virtual testing environment and elimination of parallel development and maintenance can deliver significant efficiency savings. This is true of both cost and development lead time, versus a discrete approach to simulation tool deployment.
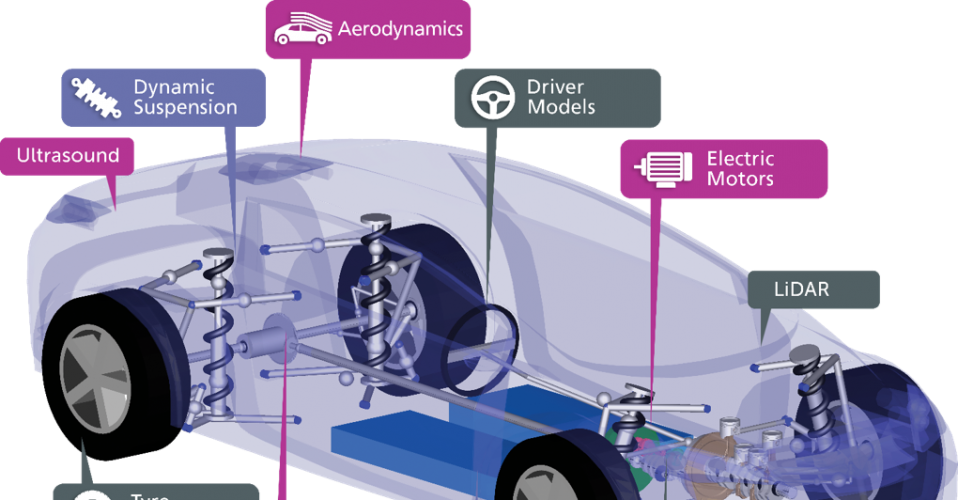
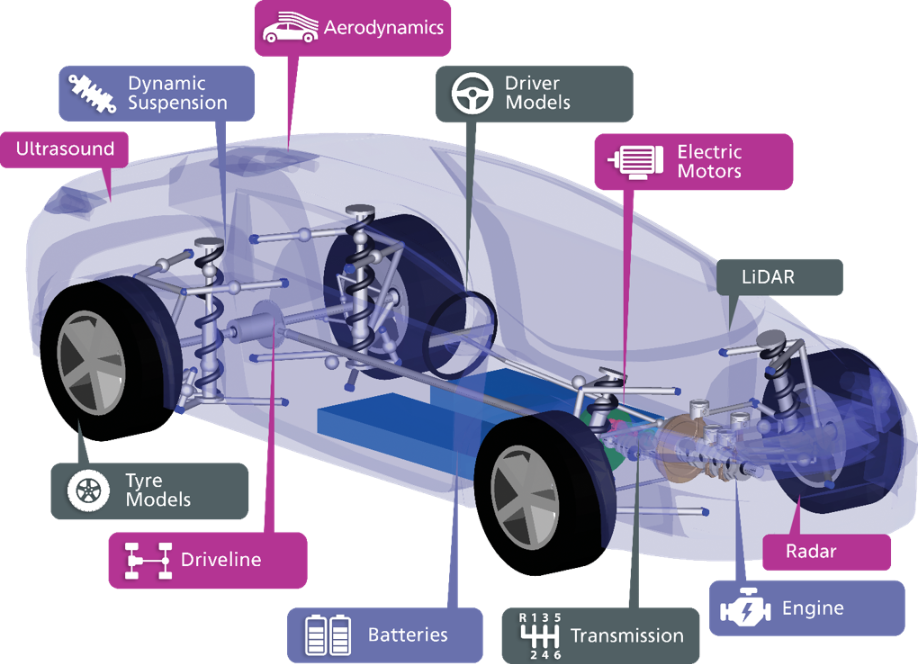
Detailed engine models of both mean value and crank angle resolved formats are available in the VeSyMA – Engines library, with the VeSyMA – Powertrain library providing full rotational multibody driveline models. VeSyMA –Suspensions provides high fidelity models focused on vehicle dynamics modelling, specifically driver models, full multibody suspension linkages, anti roll bars, steering systems and tyre models.
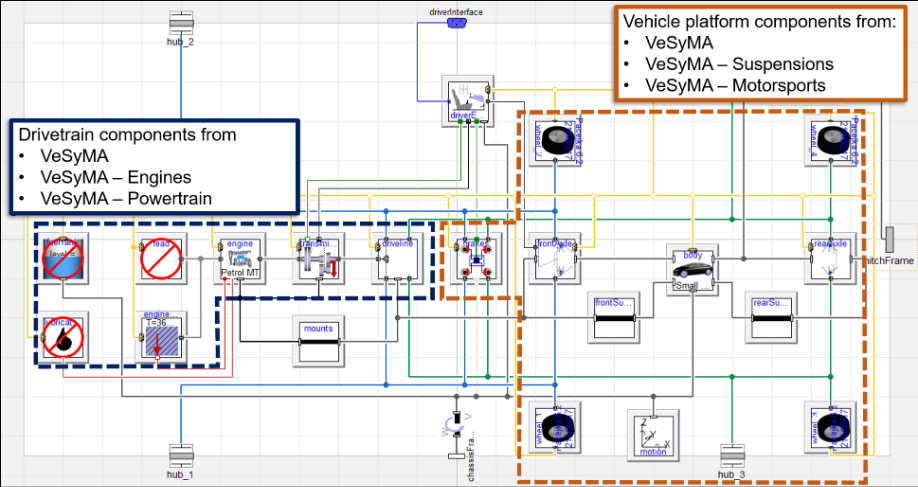
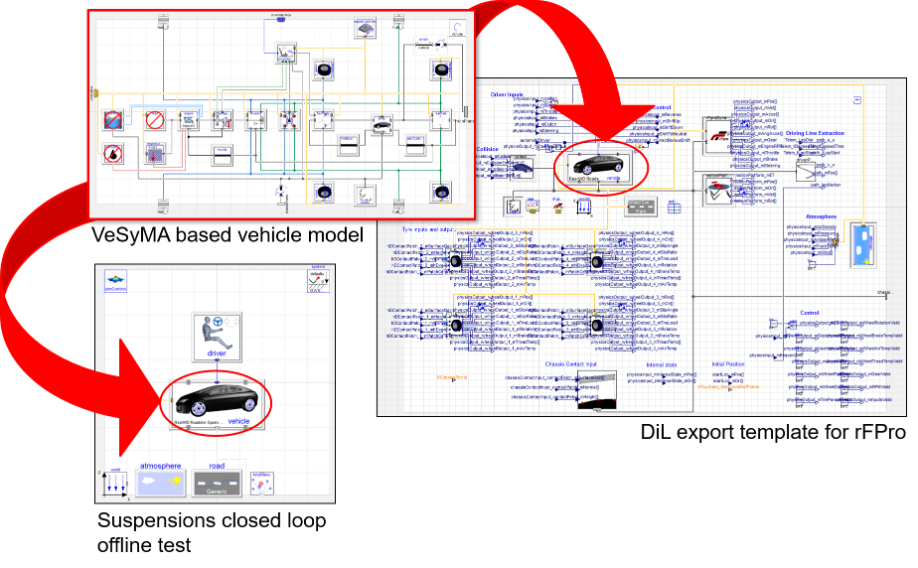
An example vehicle model built from a VeSyMA showing how the VeSyMA subject libraries can be deployed together
On top of these libraries are the VeSyMA – Motorsports, VeSyMA – Driver-in-the-Loop, and VeSyMA – Terrain Server libraries. VeSyMA – Motorsports is an extension of the Suspensions library with models pertaining to specialist Motorsports applications. VeSyMA – Driver-in-the-Loop and VeSyMA – Terrain Server enable the interface between Dymola and rFpro. The Driver-in-the-Loop library contains the models and build functions to compile a full physics vehicle model built using a VeSyMA template into an app capable of running within rFpro; the Terrain Server library enables the use of high fidelity rFpro road models in Dymola. Scalability is also built into the Driver-in-the-Loop library export models, with the ability to compile vehicle models for use in both full motion platforms and small-scale desk based workstations.
The same model can be used both offline and real-time
One key benefit of the VeSyMA suite is the ability to use the same vehicle model in both offline simulations and real-time in rFpro. This means that it is a simple process to evaluate changes determined from offline testing in the full rFpro environment. The export template provided as part of the Driver-in-the-Loop library handles all interfacing between the vehicle model and the rFpro environment, including collision handling, wheel-to-road interface, atmosphere interface and the ground interface. Depending on the rFpro plug in utilised, telemetry data can be streamed to System Monitor, Gredi or other data capture tools; vehicle parameters can also be adjusted without recompilation.
Preparing a vehicle model for real-time
Speed of simulation is, as one would expect, of consideration when developing a model for real-time running. In other words, it must run quickly enough on the target machine to complete each time step of simulation within the specified time step. Within the DiL library, there are mock simulation environments which enable the user to test the performance of the vehicle model using real time settings; these functions and model also analyse the results to inform the user on how the model performs, indicating which elements and components need to be revised to improve performance. This includes advising the user of what settings should be adjusted within rFpro to accommodate the vehicle model.

With the vehicle model selected in the DiL export template, the process of compilation of the vehicle model into an app to use in rFpro is a simple process. The user can customize every aspect of the compiled app, from the target system to solver settings, build method and naming, result inclusions, code export, compiler settings and more.
Two tools, one solution
All of this means that through VeSyMA, Claytex can offer an effective unified solution, enabling engineers to be able to fully utilise the power of both the detailed, high fidelity offline vehicle simulation in Dymola and the complex, virtual test environments of rFpro in conjunction. Component oriented model re-use eliminates inefficient model duplication and unnecessary maintenance, enabling engineers to focus on the problem at hand. For more information, please see the Claytex website. www.claytex.com
Claytex will be speaking at TaaS Technology Conference, 4th and 5th June 2019, Birmingham, UK.
The 2nd Transportation-as-a-Service (TaaS) Technology event is taking place in Birmingham, UK at the National Motor Cycle Museum on the 4th and 5th June 2019. Our annual event will draw 600+ senior decision makers from along the entire value chain of the Connected and Autonomous Vehicles (CAVs), Electric Vehicles (EVs), Energy/Battery, Charging, Infrastructure and Future Mobility industry.
Our 2019 event will include 2 co-located conferences
TaaS Technology - ‘CAVs and Future Mobility’ conference and exhibition will be dedicated to covering the key topics of the CAVs, Future Mobility and TaaS industry.
Key topics covered: https://www.taas.technology/cavs/topics
TaaS Technology – ‘Energising Future Mobility’ conference and exhibition will be dedicated to covering the key topics of the EVs, Energy/Battery Technology and Infrastructure industries.
Key topics covered: https://www.taas.technology/energy/topics
2 co-located conferences, 1 ticket, 1 exhibition.
The TaaS Technology conferences will bring together international experts for two days of in-depth discussions and exhibits focused on the opportunities and challenges of a mobility future that leverages CAVs, EVs, Battery/Energy, Charging, Infrastructure and TaaS technologies.
Attendees to the event can purchase one ticket to have full access to both conferences. Attendees will hear industry-leading insiders delivering more than 80 presentations spanning all the key topics. The conference will equip the delegates with an up-to-date overview of the status of the CAVs, EVs, Energy/Battery, Infrastructure and TaaS industry, and provide them with many opportunities to meet other key players within this community.
Speakers and sponsors will have a unique opportunity to access 2 individual but related audiences in an intimate environment - there will be lots of opportunity at the conference to make some fantastic connections and also potential business partners.
The event is being organised in partnership with Coventry University and WMG, at the University of Warwick and has already attracted an array of leading international experts.
Speakers already confirmed at this early stage, so far include: Autocab, AVL, Beryl, Bloomberg - New Energy Finance, BP, ChargeMaster, Claytex, Cube Intelligence, Department For Transport, Element Energy, free2move, Green Mobility, Hewitt Studios, iomob, ION Energy, LimeBike, Power Hydrant, Ridecell, TomTom, Uber, what3words
With only a maximum of 250 delegate places per conference and 40 exhibitors, the conference will sell out fast. Make sure you book your place as a delegate or a speaker/sponsor as soon as you can. https://taas.technology
Modern vehicles; modern challenges
Modified on Monday 17th December 2018
Find all articles related to:
Modern vehicles; modern challenges